有4个构件在一处铰接,则构成4个转动副_
查看答案


热门试题
6个构件交汇而成的复合铰链,可构成()个转动副
四个构件汇交而成的复合铰链,可构成()个转动副.
两个以上的构件共用同一转动轴线所构成的转动副称为____
两个构件在多处接触构成移动副,各接触处两构件相对移动方向 时,按一个移动副计算()
两个以上构件在同一处组成的运动副即为复合铰链
若有m个构件汇集在一点构成复合铰链,那么转动副的个数是()
若有m个构件汇集在一点构成复合铰链,那么转动副的个数是m+1()
两构件通过转动副连接,则两构件间()
两构件通过转动副连接,则两构件间()
两构件组成转动副时,速度瞬心在转动副的回转中心处()
两个构件组成转动副以后,约束情况是()
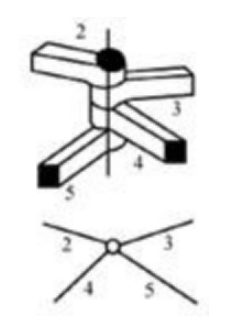 把两个以上构件形成的转动副称为复合铰链,图中的转动副数目为( )。
在铰链四杆机构中,如果某个转动副能成为整转副,则它所连接的两个构件中,必有一个为最短杆,并且四个构件的长度关系满足杆长之和条件。()
有两个平面机构的自由度都等于1,现用一个带有两个转动副的运动构件将它们串成一个平面机构,则其自由度等于__________
构成局域网需要4个基本硬件构件,它们是( )
构成运动副的两个构件间的接触有()种形式。
构成运动副的两个构件间的接触有()的形式。
两个构件在多处接触构成移动副,各接触处两构件相对移动的方向()时,将引入虚约束
组成运动副的两个构件只能做相对直线移动,这种运动副称为转动副()
组成运动副的两个构件只能作相对直线移动,这种运动副称为转动副()
把两个以上构件形成的转动副称为复合铰链,图中的转动副数目为( )。
在铰链四杆机构中,如果某个转动副能成为整转副,则它所连接的两个构件中,必有一个为最短杆,并且四个构件的长度关系满足杆长之和条件。()
有两个平面机构的自由度都等于1,现用一个带有两个转动副的运动构件将它们串成一个平面机构,则其自由度等于__________
构成局域网需要4个基本硬件构件,它们是( )
构成运动副的两个构件间的接触有()种形式。
构成运动副的两个构件间的接触有()的形式。
两个构件在多处接触构成移动副,各接触处两构件相对移动的方向()时,将引入虚约束
组成运动副的两个构件只能做相对直线移动,这种运动副称为转动副()
组成运动副的两个构件只能作相对直线移动,这种运动副称为转动副()
把两个以上构件形成的转动副称为复合铰链,图中的转动副数目为( )。
在铰链四杆机构中,如果某个转动副能成为整转副,则它所连接的两个构件中,必有一个为最短杆,并且四个构件的长度关系满足杆长之和条件。()
有两个平面机构的自由度都等于1,现用一个带有两个转动副的运动构件将它们串成一个平面机构,则其自由度等于__________
构成局域网需要4个基本硬件构件,它们是( )
构成运动副的两个构件间的接触有()种形式。
构成运动副的两个构件间的接触有()的形式。
两个构件在多处接触构成移动副,各接触处两构件相对移动的方向()时,将引入虚约束
组成运动副的两个构件只能做相对直线移动,这种运动副称为转动副()
组成运动副的两个构件只能作相对直线移动,这种运动副称为转动副()

